市场上应用广泛的平衡机测量方式主要有圈带驱动、自驱动、万向节驱动等。那么不同平衡机的驱动方式有何优缺点呢,申曼动平衡机厂技术师傅为大家详细讲解。
圈带平衡机
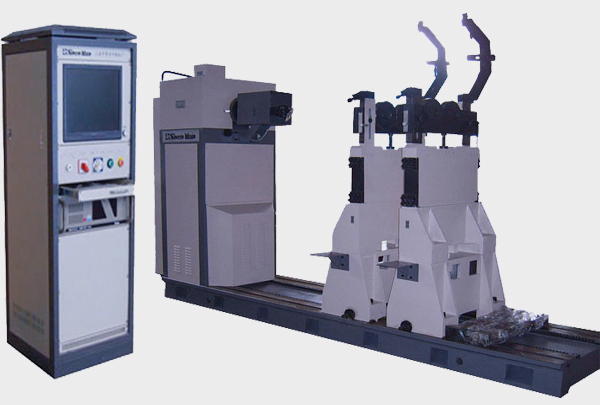
圈带平衡机:圈带驱动是一种平衡机精度较高的驱动方式,通过平衡机的橡胶环形带或丝织环形带,并由电机皮带轮驱动测量转子旋转,因此圈带平衡机要求测量转子表面必须有光滑的圆柱表面。如果是不光滑的表面或者是有不规则的形状,圈带传动方式都是不能成功的。
圈带驱动的优点:是不影响测量转子的不平衡量,动平衡精度高,操作简单。
圈带驱动的缺点:测量转子必须要有光滑的圆柱表面。

自驱动平衡机
自驱动平衡机:自驱动技术是利用转子自身的动力旋转,自驱动是对平衡精度影响最小的驱动方式,平衡精度可达最高,但只有结构允许的特殊转子才能使用这种驱动方式。
自驱动的优点:模拟实际运行状态进行测量,平衡精度高、消除组件装配所产生的二次平衡误差。
自驱动的缺点:只有结构允许的特殊工件才能使用这种驱动方式。
万向节平衡机
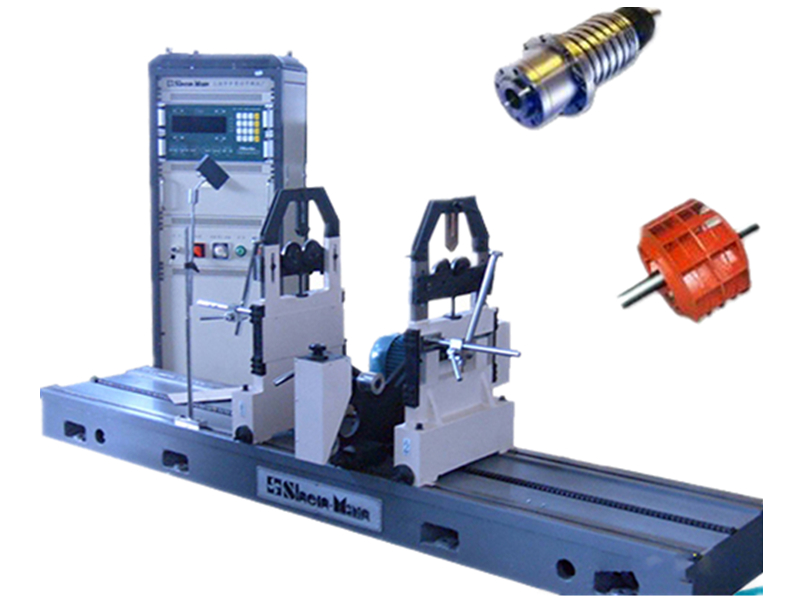
万向节平衡机:万向节驱动的原理是平衡机通过主轴与转子相联接,可以传递较大的扭矩。适合驱动风机叶轮等风阻较大的转子,但由于万向节自身的不平衡量会对测量转子产生影响,干扰平衡精度(因此万向节在使用前要对其进行平衡校正),此外还要做大量的连接盘以适应不同型号的转子。
万向节驱的动优点:适合外表不规则的转子,传递扭矩大。
万向节驱动的缺点:万向节本身的不平衡量会对转子平衡造成影响,干扰平衡的精度,此外还要做大量的连接盘以适应不同型号的转子,测量精度较低。
平衡机是减小振动、改善性能和提高质量的必不可少的设备,每个不平衡的转子在其旋转过程中对其支承结构和转子本身产生一个压力,并导致振动。对转子的动平衡是十分有必要的,申曼平衡机就是对转子在旋转状态下进行动平衡较验;动平衡机的主要性能是用最小可达剩余不平衡量动平衡机减少率两项综合指标。
圈带平衡机
圈带平衡机:圈带驱动是一种平衡机精度较高的驱动方式,通过平衡机的橡胶环形带或丝织环形带,并由电机皮带轮驱动测量转子旋转,因此圈带平衡机要求测量转子表面必须有光滑的圆柱表面。如果是不光滑的表面或者是有不规则的形状,圈带传动方式都是不能成功的。
圈带驱动的优点:是不影响测量转子的不平衡量,动平衡精度高,操作简单。
圈带驱动的缺点:测量转子必须要有光滑的圆柱表面。
自驱动平衡机
自驱动平衡机:自驱动技术是利用转子自身的动力旋转,自驱动是对平衡精度影响最小的驱动方式,平衡精度可达最高,但只有结构允许的特殊转子才能使用这种驱动方式。
自驱动的优点:模拟实际运行状态进行测量,平衡精度高、消除组件装配所产生的二次平衡误差。
自驱动的缺点:只有结构允许的特殊工件才能使用这种驱动方式。
万向节平衡机
万向节平衡机:万向节驱动的原理是平衡机通过主轴与转子相联接,可以传递较大的扭矩。适合驱动风机叶轮等风阻较大的转子,但由于万向节自身的不平衡量会对测量转子产生影响,干扰平衡精度(因此万向节在使用前要对其进行平衡校正),此外还要做大量的连接盘以适应不同型号的转子。
万向节驱的动优点:适合外表不规则的转子,传递扭矩大。
万向节驱动的缺点:万向节本身的不平衡量会对转子平衡造成影响,干扰平衡的精度,此外还要做大量的连接盘以适应不同型号的转子,测量精度较低。
平衡机是减小振动、改善性能和提高质量的必不可少的设备,每个不平衡的转子在其旋转过程中对其支承结构和转子本身产生一个压力,并导致振动。对转子的动平衡是十分有必要的,申曼平衡机就是对转子在旋转状态下进行动平衡较验;动平衡机的主要性能是用最小可达剩余不平衡量动平衡机减少率两项综合指标。
877 浏览